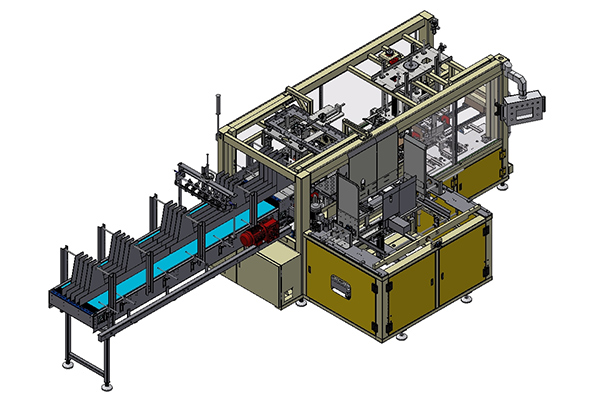
Linie de ambalare cutie cu coordonate servo (cu pereți despărțitori din carton)

Linia de producție a ambalajelor constă dintr-un divizor de mare viteză, o linie de transport al produselor, o linie de transport prin prindere, un robot Hbot, un mecanism de mișcare cu ax dublu, o linie de transport al cutiilor, un mecanism de detectare, un dispozitiv de prindere a partițiilor din carton, un sistem de alimentare a partițiilor din carton, o servocoordonată, un dispozitiv de prindere a sticlelor și un gard de protecție. Divizorul de mare viteză împarte produsele în mai multe benzi, în timp ce mecanismul de mișcare cu ax dublu accelerează trecerea produselor. După ce produsul ajunge la stația de partiționare a cartonului, robotul Scar încarcă partiția din carton în produsele aranjate. Produsele ajung pe transportorul de sortare. Ulterior, produsele sunt preluate de dispozitivul de prindere și plasate în cutia de carton, iar transportorul de cutii transportă cutia care conține produsul afară.
Schema completă a sistemului de ambalare

Configurația principală
| Braț robotic | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servomotor | Siemens/Panasonic |
| Variator de frecvență | Danfoss |
| Senzor fotoelectric | BOLNAV |
| Touch screen | Siemens |
| Aparate de joasă tensiune | Schneider |
| Terminal | Phoenix |
| Pneumatic | FESTO/SMC |
| Disc de aspirare | PIAB |
| Rulment | KF/NSK |
| Pompă de vid | PIAB |
| PLC-uri | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Placă/lanț de lanț | Intralox/Rexnord/Regina |
Descrierea structurii principale




Mai multe emisiuni video
- Mașină de ambalat în cutii cu coordonate servo pentru sticle de sticlă cu pereți despărțitori din carton